Not sure how I feel about this.

Today, OSVehicle is announcing its acquisition by General Motors Company. GM already bought another Y Combinator backed company Cruise Automation in March last year to focus on key long-term technologies such as autonomous driving technology and vehicle safety.
GM will now utilize OSVehicle’s open source hardware expertise to develop EDIT, a self-driving car, based on modular version of Chevy Bolt M1 platform. This modular technology was developed jointly with OSVehicle, to enable the easy replacement of key components such as electric motor and battery pack, which will allow vehicles to last 10X longer than traditional cars.
Modularity also allows the hardware upgrade of hardware stacks for self-driving and connected-cars, helping services like ride sharing. This is another strategic move made by GM towards “mobility as-a-service” after investing 500M $ in Lyft and launching Maven, GM’s own car sharing service in January 2016.
[via osvehicle]


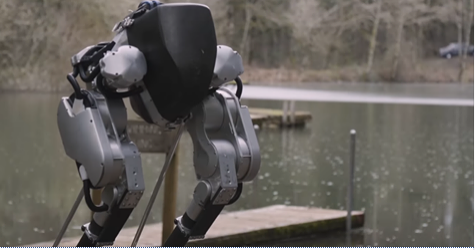 Since then, robots have fascinated the minds of sci-fi writers and engineers alike. Which brings us to Cassie – the next generation of bipedal robots devised by
Since then, robots have fascinated the minds of sci-fi writers and engineers alike. Which brings us to Cassie – the next generation of bipedal robots devised by